Nanomedicine, Volume IIA: Biocompatibility
© 2003 Robert A. Freitas Jr. All Rights Reserved.
Robert A. Freitas Jr., Nanomedicine, Volume IIA: Biocompatibility, Landes Bioscience, Georgetown, TX, 2003
15.2.2.4 Sorboregulatory and Adhesioregulatory Surfaces
In more complex applications where specific or nonspecific adhesive interactions are needed during only one portion of the nanomedical mission, or where alternative specific adhesivities are desired during different mission segments or at different times or physical locations during the mission, it may be necessary to actively regulate the adhesive characteristics of the nanorobot surface. A sorboregulatory surface may be an active metamorphic surface (Section 5.3) that allows the nanorobot to alter the character, number density [5737], or spatial pattern of its display ligands or surface receptors in real time, to encourage or discourage the adhesion of specific biomolecular species. In sum, a sorboregulatory surface enables in situ regulation of the selective binding characteristics of surfaces, in response either to commands by medical personnel or to programmed procedures executed by an onboard nanocomputer that is making choices driven by sensor data, predetermined conditions, or timing schedules.
One simple model of a sorboregulatory surface is the presentation semaphore design described in Section 5.3.6. In this model, piston-bonded ligands of various types are alternatively exposed or retracted at the nanorobot surface, producing, for example, a surface that may be switched from hydrophobic to hydrophilic in ~1 msec, assuming a ~10 nm piston throw at ~1 cm/sec. Somewhat longer times may be required if semaphore molecules must be reconditioned prior to reuse, perhaps because of the unwanted attachment of an exogenous biomolecule to the display ligand during exposure (which biomolecule is then dragged back into the nanodevice along with the display ligand during the retraction cycle). Alternatively, the employment of sacrificial display ligands which are jettisoned after use avoids the need for reconditioning (Chapter 19), but requires the storage or synthesis of new display ligands which must then be regarded as consumables.
Display ligand-based sorboregulatory surfaces can manifest specific sorption patterns on the nanorobot surface, such as a hydrophobic head and a hydrophilic tail (Section 9.4.5.3). Such surfaces could also deploy a steric barrier during part of the nanomedical mission, then retract or eject it during other parts of the mission, thus enabling nonspecific adhesive interactions to occur only at that time. Or such surfaces could deploy sacrificial fusion protein coatings to facilitate cytopenetration (Section 9.4.5.4). Nanorobotic organs coated with a sorboregulatory surface could periodically slough off biofilm attachments by initiating end-to-end traveling waves of adhesion to the polysaccharide interstitial matrix, or could encourage cell attachment and migration in specific patterns across the surface [1523-1528].
By 2002, experimental research on ligand presentation surfaces had just begun [6247]. In one study [1596], 5-300 nm diamond nanoparticles that were surface-modified to serve as adjuvants to enhance immunity to antigens (e.g., as antigen delivery vehicles) provided conformational (e.g., vertical) ligand stabilization, as well as a high degree of surface exposure and coating efficiency, for protein antigens.
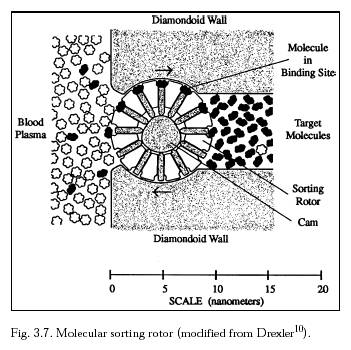
Another approach to building a sorboregulatory surface is to use surfaces coated with artificial receptors* rather than ligand display mechanisms. For instance, a surface of receptors having maximum specificity for albumin would preferentially attract a predominantly albumin coating when exposed to serum, thus immediately providing a steric barrier to most other adhesive interactions. Periodically, ejection rods could be thrust into the receptors from below (Sections 3.4.2 and 4.2), jettisoning bound species (also scraping off any species adhering to the rods; see Figure 3.7) and allowing regular and rapid refreshment of the barrier coating. Note that a complete monolayer coverage by fibrinogen molecules amounts to ~104 molecules/micron2 [542], or ~100 nm2/molecule which is very roughly the same surface area as a single molecular sorting rotor (Section 3.4.2). In even more advanced systems, reconfigurable binding sites (Section 3.5.7.4) might be programmed to adopt different receptor specificities as the nanomedical mission progresses. A brachiating nanorobot is yet another example of a device with modulated adhesivity – the arms successively attach and detach from extracellular matrix (Section 9.4.4.2) or intracellular cytoskeleton components (Section 9.4.6). Although the experimental research discipline of artificial receptors is now well established [5296-5302], a more systematic approach to artificial binding site design [5303-5309] and further experiments involving single molecules in nanocavities [5310] are needed. Potential differences in protein conformations in the rich in vivo environment (compared to the more controlled in vitro environment) must also be taken into account.
* Ratner and colleagues at the University of Washington Center for Bioengineering have researched the engineering of polymer surfaces containing arrays of artificial receptors. In one series of experiments, Ratner et al [1597, 1598] used a radiofrequency-plasma glow-discharge process to imprint a polysaccharide-like film with nanometer-sized pits in the shape of such biologically useful protein molecules as albumin, fibrinogen, lactalbumin, glutamine synthetase, lysozyme, ribonuclease, immunoglobulin, and streptavidin. Each protein type sticks only to a pit with the shape of that protein. Ratner’s engineered surfaces may be used for quick biochemical separations and assays, and in biosensors [1599] and chemosensors [1602], because such surfaces will selectively adsorb from solution only the specific protein whose complementary shape has been imprinted, and only at the specific place on the surface where the shape is imprinted. Novel molecular imprinting techniques continue to emerge [5311]. The RESIST Group at the Welsh School of Pharmacy at Cardiff University [1600] and others [1601, 1602, 5312-5330] have looked at how molecularly imprinted polymers could be medically useful in near-term applications such as analysis [5317-5319], separations [5320], sensors [5320-5325], binding assays [5326], screening for drug discovery [5327], controlled drug release [1600], drug monitoring devices [1600], catalysis [5328-5330] including “plastizymes” [5329], and biological and antibody receptor mimics [1601]. Ratner believes that on implants designed to attract a specific class of proteins – for example, osteopontin, a protein found in healing wounds – the macrophages might respond differently and the implant coating might stimulate healing rather than scarring or inflammation [1603].
Adhesioregulatory surfaces are metamorphic surfaces (Section 5.3) that can modify adhesive characteristics by, for example, altering surface geometries – either in addition to, or in place of, the surface chemistry changes already described above. For instance, an adhesioregulatory mechanism could erect, move, or retract steps, grooves, or pillars across nanoorgan surfaces to influence cell mobility (Section 15.2.2.3). Alternatively, noncovalently adhered proteins (including complement or antibodies) or other biomolecules might be physically desorbed by cleaving them using close-fitting sliding plates in an appropriate metamorphic surface design (Section 5.3.2.2), or by using surface-embedded dynamically sized and shaped nanopores (Section 3.3.2), or by using various externally-mounted self-cleaning wiper-blade or scraper mechanisms. Surfaces containing embedded vents or reversible sorting rotors could blow off many cells that were trying to become attached, or could secrete internally stored or in situ manufactured detergent molecules with similar effect. All such adhesioregulatory mechanisms can equally well be employed to encourage or discourage bioadhesion at the nanorobot or nanoorgan surface. Significant research will be required to ensure adequate competitive binding specificity of engineered nanorobot surfaces and receptors (Section 3.5.3), and to ensure that nanorobot ligands will not trigger unintended signaling pathways via cellular receptors not located near the nanoorgan. Subtle entropic effects such as the spontaneous formation of surface undulations known as capillary waves [5724] must also be taken into account.
The control of wettability has already been demonstrated by light-induced [6069, 6070] and electrochemical [6071-6074] surface modifications involving chemical reactions, but Lahann et al [6075] have demonstrated an alternative approach for dynamically controlling interfacial properties that uses a change in electrical potential on gold surface to achieve fully reversible conformational transitions (switching) of surface-confined molecules between a hydrophilic and a moderately hydrophobic state without altering the chemical identity of the surface. According to one report [6076]: “The new switchable surface essentially consists of a forest of molecules only a billionth of a meter tall, engineered to stand at a precise distance from each other. In this particular case, the team makes the top of each molecule negatively charged and hydrophilic (water-loving), and the trunk positively charged and hydrophobic (water-repelling). When a positive electrical potential is applied, the induced attractive force causes the top to bend down. The resulting loop that is now exposed is hydrophobic. Reverse the electrical potential and the molecules will straighten to their full height, the hydrophilic tops once more attracting water.” Note the researchers [6075]: “This study demonstrates reversible control of surface switching for a low-density monolayer. The fact that controlled conformational reorientations of single-layered molecules induced observable changes in wettability suggest that these findings may, with further study, have implications in dynamic regulation of macroscopic properties, such as wettability, adhesion, friction, or biocompatibility.”
An interesting example of adhesioregulation in nature is found in the bacterium E. coli. Researchers at the University of Washington have recently discovered [5446] a mechanism by which the bacterial adhesion protein FimH can detect the presence of urinary tract shear flow and “lock down” the bacterium on the surface being invaded, binding tighter as shear forces rise. The protein acts as a nanometer-scale mechanical switch that senses when the force is reduced, enabling bacterial motility only during periods of low flow when the risk of dislodgment is minimized.
Last updated on 30 April 2004
{kind=link}